Manuscript Summary - Dynamic programming with partial information to overcome navigational uncertainty in a nautical environment
|
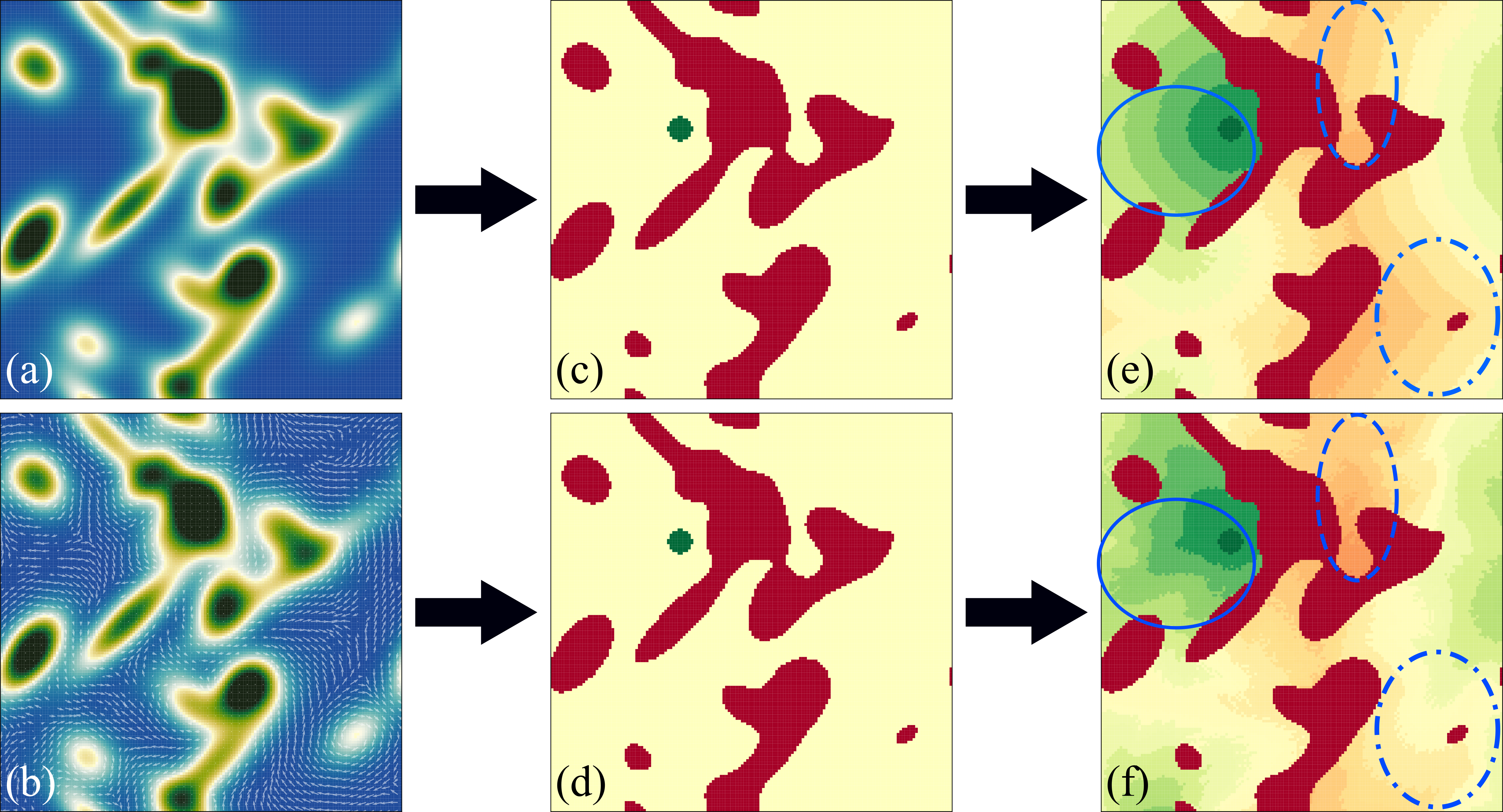
Using a toy nautical navigation environment, we show that dynamic programming can be used when only partial information about a partially observed Markov decision process (POMDP) is known. By incorporating uncertainty into our model, we show that navigation policies can be constructed that maintain safety. Adding controlled sensing methods, we show that these policies can also lower measurement costs at the same time.
https://arxiv.org/abs/2112.14657
|